control (red) and with actuation at 3250 Hz
(green).
between Mach 0.25 and 0.5: red is without forcing,
green is with forcing at frequencies and intensities
for reduction of noise.
Active control of cavity-flow resonances
Feedback control has allowed great preformance improvement in many technical fields such as robotics, aerospace, telecommunication, transportation systems, manufacturing systems, and chemical processes. Recently, various attempts have been made to apply feedback control techniques to aerodynamics. This is challenging since flow can not be described by simple models. The Collaborative Center of Control Science at The Ohio State University has contributed to the advancement of the state of the art in this field with a multi-disciplinary effort to develop tools and methodologies for feedback flow control. Initially this was done by choosing as a benchmark problem the control of cavity flow resonance. |
To control the cavity-flow noise, a two-dimensional synthetic-jet type actuator is used in the cavity-flow facility. This is a powerful loudspeaker connected to a converging cone ending in a slot at the beginning of the cavity. In this arrangement the waves created by the loudspeaker are directed to the position where the flow vortices are created so to control their formation. |
|
| |
| Figure 1: Spectra of Mach 0.30 flow without control (red) and with actuation at 3250 Hz (green). |
Figure 2: Plots of maximum spectral peak between Mach 0.25 and 0.5: red is without forcing, green is with forcing at frequencies and intensities for reduction of noise. |
With the colleagues of CCCS I also studied and tested different closed-loop linear-control techniques for reducing cavity-flow resonance. In general these controls significantly reduce the noise at the Rossiter frequency for which they are designed, but they lead to strong noise at other frequencies (see AIAA paper 2004-0573). A parallel-proportional (PP) with time delay type of control was obtained by modifying a PID controller that remedied this problem, Fig. 3. This is as effective as the open-loop method described above, but is superior as it requires less control power and is more "robust" since it works well even if some changes occur to the air flow (as shown, for instance, in Fig. 4 for the flow at Mach 0.27; see also AIAA Journal, Vol. 44, No. 5, pp. 929-938). |
 |
 | |
| Figure 3: Spectra of Mach 0.30 flow without control (red) and with PP control (blue). |
Figure 4: Spectra of Mach 0.27 flow without control (red) and with PP control (blue). |
A the 35th AIAA Fluid Dynamics Conference and Exhibit I presented the advancements made by using a state-feedback controller based on a reduced-order model of the cavity flow (see AIAA paper 2005-5269 for more details).
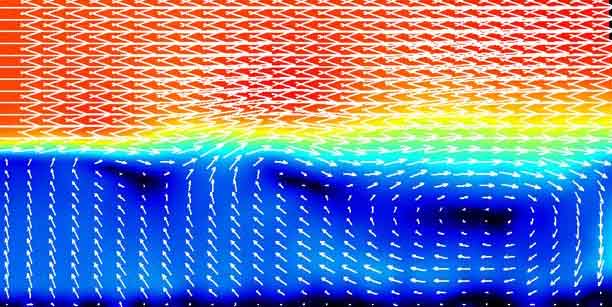
The method involves several successive steps. |
 |
 | |
| Figure 5: Vector field superimposed on an absolute velocity contour of Mach 0.30 flow. |
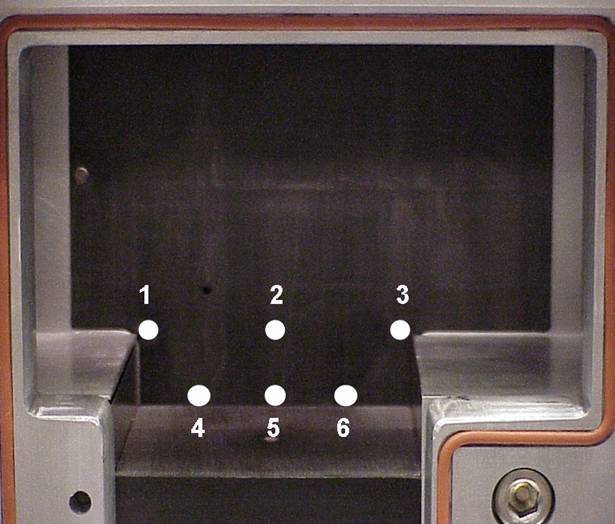
Figure 6: Pressure transducers on the side wall of the cavity. |
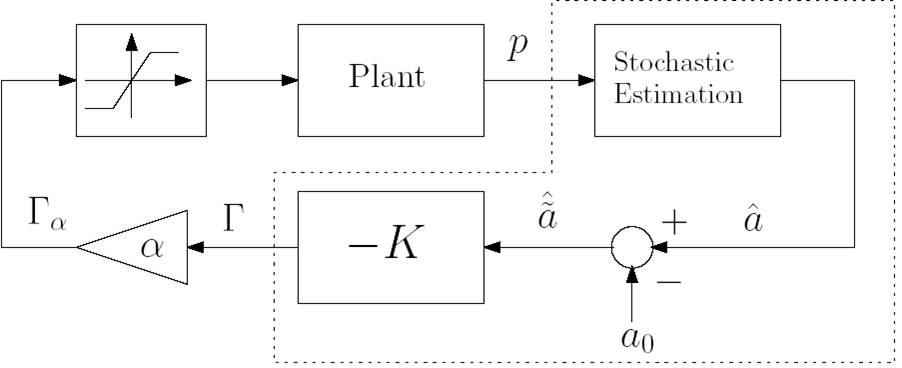
The model obtained with the steps above can be further simplified by linearizing it around its equilibrium point (corresponding to the mean flow, a quieter state than the resonant one) and by shifting the origin of the coordinates to this equilibrium point. Then a linear-quadratic (LQ) state-feedback controller is designed to bring and keep the system to the equilibrium point (Fig. 7). Experimental validations of such method indicate that the controller significantly reduces the resonance peak of the Mach 0.3 flow for which it was designed, see Fig. 8. The controller seems to be quite robust, as it can control the flow with some variations in the flow Mach number (see also Journal of Fluids Engineering, Vol. 129, pp. 813-824). In term of sheer noise reduction this sophisticated method is slightly less effective than the ones described above, but it actually represents a big leap forward as it is based on a model of the flow and it enables the use of modern control theory techniques to a higher degree. |
 |
 | |
| Figure 7: Diagram of the closed loop system with linear quadratic state feedback control. |
Figure 8: Spectra of Mach 0.30 flow without control (red) and with linear quadratic control (brown). |
Additional information on this research can be found in:
|
| MD previous research | MD research | MD home |